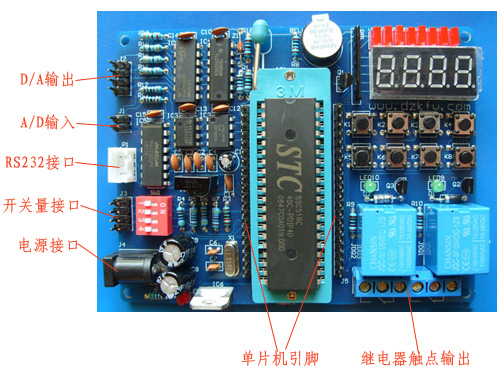
实验板全功能测试程序:此程序用于该实验板的全部功能测试,发货时实验板的单片机上已经烧写了这个程序,用···
一,MOSFET导通、关断过程详细分析(转)详见下MOSFET导通、关断过程详细分析二,弄懂mosfet的导通过程和损耗分析 详见下弄懂MOS··· 2023-03-27 255
ADS1100是采用2.7V~5.5V单电源供电的连续自校准模/数(A/D)转换器。它具有分辨率、接口简单、比例放大、功耗低、体积小等优点。··· 2022-09-30 192
水龙头是我们每天都在使用的,有时候漏水或者忘记关水龙头,自来水哗哗地流走,所以我们想知道水龙头流量的计算方法,还有一小时··· 2019-10-14 168
摘要: 本课题研究了包括固定轴法在内的几种RLC的传统测量方法,并进行了优缺点的分析和论证,采用了较先进的自由轴法,给出了具体··· 2010-08-21 141
摘要: R,L,C是电子电路及系统的主要元件,R,L,C参数的测量方法有电桥法、谐振法、伏安法。其中,电桥法具有较高的测量精度,··· 2010-09-30 138
1 IR2304的功能特点IR2304是国际整流器公司(IR)新推出的多功能600V高端及低端驱动集成电路,这种适于功率M··· 2022-09-30 137
也有不少上加我们的QQ,跟我们分享、讨论。今天给大家分享一下手机QQ的。大家知道电脑上可以强行聊天,点击可以直接跳出QQ。那么··· 2022-10-06 120
74LS电路系列名称解释74ls00 2输入四与非门74ls01 2输入四与非门(oc)74ls02 2输入四或非门74ls03 2输入四与非门(oc)74ls04六倒相··· 2020-11-30 120
本文主要介绍其基本概念、工作原理及典型工作电路,并介绍一些常用的电压比较器。什么是电压比较器简单地说, 电压比较器是对两个··· 2009-07-24 115
市场上盛行的电子高压灭蚊手拍(简称“电蚊拍”),以其实用、灭蚊效果好、无化学污染、安全卫生等优点,普遍受到人们的欢迎。其··· 2008-07-03 114
电感是开关电源中重要的元件之一,其合理设计有利于提高电源效率和可靠性。为防止电感饱和,需要在磁芯中加入气隙。铁粉芯的气隙··· 2009-10-28 114
<一>. 和可靠性有关的几个概念1.建立时间和保持时间建立时间(setup time)是指在触发器的时钟信号上升沿到来以前,数据稳··· 2022-10-01 113
耦合系数定义耦合系数,在电路中,为表示元件间耦合的松紧程度,把两电感元件间实际的互感(绝对值)与其最大极限值之比定义为耦··· 2022-10-13 109
1. 线形光耦介绍光隔离是一种很常用的信号隔离形式。常用光耦器件及其外围电路组成。由于光耦电路简单,在数字隔离电路或数据传输··· 2017-11-04 109
UC3844 UC3845 是高性能固定频率电流模式控制器专为离线和直流至直流变换器应用而设计,为设计人员提供只需最少外部元件就能获得··· 2008-11-05 101
记得在我们网站的论坛里,曾经有一位网友问了一个问题,什么是单片机?单片机是怎样的一个东东?单片机可以实现些什么功能?它主··· 2008-06-02 99
高频变压器线径计算:高频变压器线径的确定根据公式D=1.13(I/J)^1/2可以计算出来,J是电流密度,不同的取值计算出的线径不同。··· 2016-10-14 93
镍镉/镍氢电池的发展 1899年,Waldmar Jungner在开口型镍镉电池中,首先使用了镍极板,几乎与此同时,Thomas Edison 发明了用于电··· 2008-05-01 91
1 引言AD9833是ADI公司生产的一款低功耗,可编程波形发生器,能够产生正弦波、三角波、方波输出。波形发生器广泛应用于各种测量、激··· 2009-07-30 85
在设计反激变压器时经常会采用 Ap 法来选择磁芯,然而常见的 Ap 法公式算出的结果并不准确(普遍偏小)通常还要结合经验法。从原··· 2018-10-25 84
CBB电容其实是很多种类的,比如CBB20、CBB21/22、CBB81、CBB60、MMKP82等等,其中用的最多的就是CBB22和CBB81,cbb电容22与81的区··· 2023-10-28
一,MOSFET导通、关断过程详细分析(转)详见下MOSFET导通、关断过程详细分析二,弄懂mosfet的导通过程和损耗分析 详见下弄懂MOS··· 2023-03-27
尽管FPGA和CPLD都是可编程ASIC器件,有很多共同特点,但由于CPLD和FPGA结构上的差异,具有各自的特点:①CPLD更适合完成各种算法和组··· 2023-03-04
市面是大多数串口屏(包括大*、迪*的部分产品都)在使用,及早先一些带串口和TTL兼任的设备上多用这个电路 Ti的SN74AHCT86PWR 2023-02-27
纳米晶材料同时具备了硅钢、坡莫合金、铁氧体的优点。即:1. 高磁感:饱和磁感Bs=1.2T,是坡莫合金的一倍,铁氧体的2.5倍。铁芯功··· 2023-02-26
74LS电路系列名称解释74ls00 2输入四与非门74ls01 2输入四与非门(oc)74ls02 2输入四或非门74ls03 2输入四与非门(oc)74ls04六倒相··· 2020-11-30
在一些特殊要求的电子产品领域,例如无限次的擦写次数、极快的读写速度或是极恶劣的温度环境下也不丢数据、存储可靠性极度高的特··· 2020-08-26
问题:该问题由某客户提出,发生在STM32F100R8T6器件上。据其工程师讲述:在使用 STM32F100 的DAC时,不管如何设置输出的值,最低··· 2018-11-12
UC3844 UC3845 是高性能固定频率电流模式控制器专为离线和直流至直流变换器应用而设计,为设计人员提供只需最少外部元件就能获得··· 2008-11-05
1 引言在现代电气测量和控制中,常常需要用低压器件去测量、控制高电压、强电流等模拟量,如果模拟量与数字量之间没有电气隔离,··· 2019-09-04
1. 线形光耦介绍光隔离是一种很常用的信号隔离形式。常用光耦器件及其外围电路组成。由于光耦电路简单,在数字隔离电路或数据传输··· 2017-11-04
光电耦合器又称光耦(opticalcoupler,OC),其原理是把发光器(红外线发光二极管LED)与受光器(光敏半导体管)封装在同一管壳内··· 2018-11-04
电感是开关电源中重要的元件之一,其合理设计有利于提高电源效率和可靠性。为防止电感饱和,需要在磁芯中加入气隙。铁粉芯的气隙··· 2009-10-28
最近又了解新东西了,那就是气隙,电感的气隙或者是变压器的气隙。 总有人喊我大佬,我知道,他们只是不知道怎么称呼我而已。说··· 2018-10-28
1、电源技术要求2、设计步骤3、变压器设计4、输出滤波器设计5、复位电路计算6、功率开关管选择7、输出二极管选择8、恒流输出电路··· 2016-10-28
电子产品中,总是可见DC-DC的身影,今天分享DC-DC的相关知识点。一、概念及特点DC-DC指直流转直流电源(Direct Current)。是一种··· 2017-10-27
图1-1-a是串联式的最简单工作原理图,图1-1-a中ui是开关电源的工作电压,即:直流输入电压;k是控制开关,r是负载。当控制开关k接··· 2016-10-27
串联型开关电源,因为其开关管与负载串联而得名,由于结构所限,其输出端冷地与300V端地热没法隔离,所以又叫热底板电源。显然这··· 2019-10-27
基础电路:一般直流稳压电源都使用220伏市电作为电源,经过变压、整流、滤波后输送给稳压电路进行稳压,最终成为稳定的直流电源。··· 2018-10-26
桥式整流电路的滤波电容取值在工程设计中,一般由两个切入点来计算。一是根据电容由整流电源充电与对负载电阻放电的周期,再乘上··· 2016-10-26
在设计反激变压器时经常会采用 Ap 法来选择磁芯,然而常见的 Ap 法公式算出的结果并不准确(普遍偏小)通常还要结合经验法。从原··· 2018-10-25
描述电源适配器相信大家在生活中也经常接触,在长时间使用时会发烫,如果电源温度一旦超过75℃以上,在使用电源时就会严重影响电··· 2020-10-20
整流电路整流出来的电源包含相当大的交流成分,其中脉动性比较大,只能供给对直流质量要求不高的设备使用,不能满足那些要求直流··· 2020-10-19
常见的π型滤波电路包括两个电容和一个电感,有RC和LC两种类型,一般在输出电流不大的情况下用RC,并且R的取值不能太大,但效果··· 2020-10-17
水龙头是我们每天都在使用的,有时候漏水或者忘记关水龙头,自来水哗哗地流走,所以我们想知道水龙头流量的计算方法,还有一小时··· 2019-10-14
高频变压器线径计算:高频变压器线径的确定根据公式D=1.13(I/J)^1/2可以计算出来,J是电流密度,不同的取值计算出的线径不同。··· 2016-10-14
描述线圈所产生的磁力线不能都通过次级线圈,因此产生漏磁的电感称为漏感。指变压器初次级在耦合的过程中漏掉的那一部份磁通。漏··· 2016-10-15
耦合系数定义耦合系数,在电路中,为表示元件间耦合的松紧程度,把两电感元件间实际的互感(绝对值)与其最大极限值之比定义为耦··· 2022-10-13
定义:感应加热是利用电磁感应原理加热导电材料的非接触式电加热过程。此处热量在导电材料内产生,而不与源直接接触,所以能达到··· 2022-10-09
1. 引言与传统点焊电源相比, 由于逆变直流点焊电源具有焊接变压器小型轻量化、易实现高速精密控制、输出低脉动功率的直流焊接电··· 2017-10-08
也有不少上加我们的QQ,跟我们分享、讨论。今天给大家分享一下手机QQ的。大家知道电脑上可以强行聊天,点击可以直接跳出QQ。那么··· 2022-10-06
摘要: 本课题研究了包括固定轴法在内的几种RLC的传统测量方法,并进行了优缺点的分析和论证,采用了较先进的自由轴法,给出了具体··· 2010-08-21
一、场效应管的分类场效应管分结型、绝缘栅型两大类。结型场效应管(JFET)因有两个PN结而得名,绝缘栅型场效应管(JGFET)则因栅··· 2008-05-01
1 系统测量原理测量方法采用多周期同步测量法,保证了测量精度。多周期同步测量原理与传统的频率和周期的测量原理不同,时钟信号··· 2008-05-01
1 引言AD9833是ADI公司生产的一款低功耗,可编程波形发生器,能够产生正弦波、三角波、方波输出。波形发生器广泛应用于各种测量、激··· 2009-07-30
1.引言GPS(Global Positioning System)全球定位系统是利用美国的24颗GPS地球卫星所发射的信号而建立的导航、定位、授时的系统。··· 2008-05-01
2009-06-30
镍镉/镍氢电池的发展 1899年,Waldmar Jungner在开口型镍镉电池中,首先使用了镍极板,几乎与此同时,Thomas Edison 发明了用于电··· 2008-05-01
回复1:这是一个DeCap,也就是所谓的退耦电容,并不是旁路滤波电容(bypass)。主要是用来抑制IC内部的杂讯如振荡器的多次谐波等传到··· 2009-06-30
4 脚,光电耦合器 (4 Pin Optocouplers)----GaAs 输入,光电晶体管输出型号(规格)厂牌CTR @10 mA IF(%)BVCEO(V)minBVCBO(V)maxVC··· 2008-06-01
咨询专员
18906103328

 咨询专员
咨询专员
